海上风电场与航路安全间距确定研究
2021-01-06 17:11 [新能源论文] 来源于:互联网 作者:互联网
导读:作者:未知 摘 要:为保障船舶在海上风电场水域附近航路航行时与风机保持足够的安全间距,确保船舶安全航行和风机正常运行,基于船舶在海上风电场水域航行的实际情况,综合考虑船舶自身特性、风机正常运行所需安全领域、风致漂移量、流致漂移量等影响因素,
|
作者:未知
摘 要:为保障船舶在海上风电场水域附近航路航行时与风机保持足够的安全间距,确保船舶安全航行和风机正常运行,基于船舶在海上风电场水域航行的实际情况,综合考虑船舶自身特性、风机正常运行所需安全领域、风致漂移量、流致漂移量等影响因素,构建了基于改进失控漂移模型的海上风电场与航路安全间距计算模型。以江苏如东海域为例,运用MATLAB软件计算了15万吨级散货船、5万吨级集装箱船、15万吨级油船以及5万吨级化学品船在失控状态下与风机的安全间距,为相关部门提供参考。
关键词:海上风电场;船舶通航安全;失控漂移模型;安全间距
海上风电场建成运行后,作为水域附近固定的碍航物,占用了一定的水域面积,与水域附近的航道、习惯航路、锚地等产生一定的矛盾,增加了海上风电场附近水域船舶通航环境的压力[1]。薛双飞等[2]针对船舶与海上风电场碰撞问题,研究基于A*改进的船舶避碰算法,得到船舶在海上风电场水域附近航行的安全航线;李国帅等[3]在研究平台与习惯航线的安全距离时,基于船舶领域理论建立模型并进行计算,但是对于风流压差的设置缺乏科学性;沈崇松[4]首次将船舶失控漂移模型运用到油田平台安全作业区范围大小的确定上。但以上学者均未涉及海上风电场与习惯航路、航道或锚地等的安全间距的研究。现有船舶与海上风电场风机的安全距离是建立在某种特殊状态下船舶运动的数学模型而得到的,或是通过统计历史数据得到的经验值,大多数都是船舶正常航行的情况,如果船舶在风电场水域中发生故障导致船舶失控,那么此时所需的安全距离必定会增加。综合考虑实际航行和风流等情况下改进了船舶失控漂移模型,以船舶失控在得到控制时的横向漂移量为船舶至风电场风机的最小安全距离,以期对船舶与风电场风机安全距离的计算提供一定的参考。
1 海上风电场与船舶安全间距模型建立
1.1 安全间距计算模型建立原理
1.1.1风流和压差
船舶在航行过程中会受到风流等因素的影响,其实际航线将会偏离计划航线并改变预定航速。
1.1.2船舶失控漂移
船舶航行安全威胁最大的原因之一为船舶失控。船舶失控[5]指船舶发生机械故障,无法自主航行,亦无法通过操纵船舶避让其他船舶和障碍物的情况。
根据船舶失控漂移理论,船舶在海上风电场区附近发生失控并产生漂移时,失控船舶的计划航线与海上风电场区之间存在一定的安全间距,使得船舶在发生横向漂移并在到达海上风电场区之前,能通过一定的措施将处于失控状态下的船舶控制住,使失控船舶不误入海上风电场区与风机发生碰撞。
1.2 安全間距计算模型的建立
设船舶在航行中发生失控危险,船舶失控状态能在一定的救援方法下得到控制所需要的时间为T(T< T0)。设海上风电场区船舶通航安全间距为R,因此:
2 安全间距计实例
2.1 定量参数的设置
2.1.1 船舶尺度
在分析研究江苏省沿海水域船舶通航环境以及船舶交通流特征的基础上,进一步综合《海港总体设计规范》[6]中的船型尺度,特选取以下代表船型。
2.1.2 船舶风致漂移系数K
风致漂移系数一般取0.038-0.041,文章取0.041。
2.1.3 船舶浅水修正系数
浅水修正系数可根据水深与船舶满载吃水比值来确定。
2.1.4 船舶风压差系数
船舶在航行过程中所受的风流时刻在变化,风流压差也在时刻变化,通过对大量模拟试验所测得的船舶风压差值进行处理,得到了代表船型的风压差系数,具体如表3所示。
2.1.5 船舶速度减半时间常数C
船舶速度减半时间常数可根据代表船型的排水量来确定,代表船型的船舶速度减半时间常数取值如表4所示。
2.1.6 失控航速V
2.1.7 船舶惯性接近消失船速V0
设所选取的代表船型惯性在接近消失时的航行速度V0取值为0.05m/s。
2.1.8 船舶航行环境参数的确定
综合考虑江苏如东海域监测统计的风速和流速资料,取风速的极限值为20m/s、流速的极限值为2.0m/s。
2.1.9 时间参数确定
安全间距计算模型中所涉及的时间参数有船舶失控控制时间T,即在航路航行的船舶在失控状态下得到控制所需要的时间。
通过综合考虑各种约束条件因素以及考虑江苏如东水域的海事安全保障能力和港口应急资源的配置等,论文将船舶从失控开始到失控得到控制所需要的时间设定为21min。
2.2 变量参数的设置
船舶在航行过程中所受风流作用,计划航线将会与风流作用方向形成不同夹角,将船舶计划航线与所受风流作用形成的夹角设为变量,假定船舶在航行过程中失控后所受风流为同侧风流作用下的船舶横向漂移。
2.2.1 船舶计划航线与所受风向的夹角
风的方向指风的来向,文章将船舶计划航向设置为0°,因此船舶的计划航线与风向的夹角大小与风向角的大小是相同的,假定代表船型右舷受风影响,则船舶计划航线与所受风向夹角的大小取值范围为0°~180°。
2.2.2船舶计划航线与所受流向的夹角
流的方向为流的去向,文章将船舶计划航向设置为0°,因此船舶的计划航线与流向的夹角的大小与流向角的大小是互补的,假定代表船型右舷受流影响,流向为180°~360°,则船舶计划航线与所受流向的夹角为0°~180°。
2.3 安全间距的计算
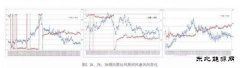
将选取的各个参数取值代入海上风电场与船舶通航安全间距模型的MATLAB程序中求解,最终得到各代表船型在不同风流条件组合的情况下与海上风电场安全间距范围大小,如图5所示。 由图所知,15万吨级散货船、5万吨级集装箱船、15万吨级油船以及5万吨级化学品船与海上风电场的安全通航间距值与不同风流条件组合下的变化趋势接近一致,同时也可得知,各代表船型的计划航线与风的夹角在80°~100°范围内时海上风电场与代表船型的安全通航间距达到了峰值,当各代表船型与流的夹角在60°~120°范围内时海上风电场与代表船型的安全通航间距达到了峰值。
同时,为保障船舶通航安全以及海上风电场的安全生产运行,船舶在海上风电场附近水域航路航行过程中所受风流等因素影响时应考虑风流组合最恶劣的情况,具体如表8所示。
由表8可知,15万吨级散货船与海上风电场的通航安全间距最大值为2649.6m;5万吨级集装箱船与海上风电场的通航安全间距最大值为2789.8m;15万吨级油船与海上风电场的通航安全间距最大值为2630.9m;5万吨级化学品船与海上风电场的通航安全间距最大为2795.5m,综合取整为2800m。综上所述,考虑通航船舶在失控状态下与风机不发生碰撞时的最小安全间距为2800m。
3 结束语
(1)通过对海上风电场水域通航安全距离计算原理和依据的介绍,构建了基于改進失控漂移模型的海上风电场与航路通航安全间距计算模型,并以在江苏如东海域航行的15万吨级散货船、5万吨级集装箱船、15万吨级油船以及5万吨级化学品船为例计算了在不同风流组合下各代表船型与风机的安全间距,并最终确定了该海域航路与风机的最小安全间距,验证了模型了有效性。
(2)从改进的船舶失控漂移模型出发计算海上风电场水域最小通航安全距离可为船舶的航路规划和海上风电场的选址提供一定的指导,对降低海上风电场水域船舶通航风险、保障风机正常运行也有一定的意义。
参考文献:
[1] 张明. 海上风电建设对船舶航行安全的影响研究[J]. 天津航海, 2014(04):58-60.
[2] 薛双飞,谢磊,王树武,夏文涛,包竹.海上风电场区船舶A~*避碰寻路算法[J].中国航海,2018,41(02):21-25.
[3] 李国帅,章文俊,尹建川. 固定式平台与习惯航线安全距离确定[J]. 船海工程, 2016, 45(1): 186-190.
[4] 崇松. 渤海海域油田平台安全作业区范围研究[J]. 天津航海, 2010, (3):28-29.
[5] 刘明俊,李世刚,杨晓妍,等. 船舶失控后运动状态分析[J]. 船海工程, 2005, (2):58-60.
[6] 中华人民共和国交通运输部. JTS 165-2013. 海港总体设计规范[S]. 北京:人民交通出版社.
(编辑:东北亚) |
 海上风电制造企业全面
海上风电制造企业全面推荐文章
热点阅读